k线 can线均呈多头排列,股价持续上涨,成交量放大,主力资金持续流入,kdj金叉向上,后市看好。具体操作思路和代码以及后期走势已经发布,我将会在朋友...
2022-09-23 2
k线 can线均呈多头排列,股价持续上涨,成交量放大,主力资金持续流入,kdj金叉向上,后市看好。具体操作思路和代码以及后期走势已经发布,我将会在朋友圈公布出来,大家可以参考学习。想把握这种类型牛股的朋友,可以来找我详细交流。另外,对于下周的几只利好个股已经选出出,有兴趣的朋友,自然知道那里查看!如果手中持有个股被套或不会判断走势的朋友,都可以一同探讨,本人看到定当鼎力相助,为大家答疑解惑。
一:K线 can线 协议
CAN总线协议 依据国际标准化组织/开放系统互连(International Standardi-zation Organization/Open SystemInterconnection,ISO/OSI)参考模型,CAN的ISO/OSI参考模型的层结构如图7-6所示。下面对CAN协议的媒体访问控制子层的一些概念和特征做如下说明:二:k线can线
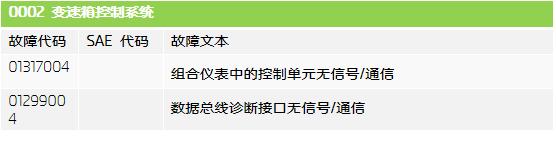
1、故障车辆信息
车型:明锐
生产日期:2010年
行驶里程数:100000KM
发动机代号:CLR
变速箱代号:09G
2、故障现象描述:
车辆放置车库后启动车辆刚开始可以正常启动,行驶中突然仪表方向盘、气囊等故障灯闪烁亮起,转速表指针归零,关闭钥匙熄火车辆后就再也无法正常启动了,通过诊断仪读取以下相关故障码。
3、故障原因分析:
相关系统/部件原理:不同区域CAN-BUS总线的速率和识别代号不同,因此一个信号要从一个总线进入到另一个总线区域,必须把它的识别信号和速率进行改变,能够让另一个系统接受,这个任务由网关(Gateway)来完成。当网关不工作时,车载网络内的所有控制单元将无法正常通讯交换信息,即所有控制单元无法正常工作!我们的诊断仪也就无法访问。
可能的原因是:
1)数据总线故障
2)其它控制单元故障干扰(不会出现多模块同时损坏的)
4、诊断排查思路和维修过程:(一)
诊断思路说明:
首先试车确认故障存在,询问客户告知车辆近期无加装和维修,启动发动机后车辆立即熄火。询问客户车辆出现故障的具体时间、环境、频率和是否近期维修加装过电气设备等情况。
通过以上故障现象及故障码(发动机和变速箱可以正常进入),初步判断网关正常。
4、诊断排查思路和维修过程:(二)
1)其它控制单元故障干扰
使用诊断仪进入自诊断后,逐一断开发动机控制单元、ABS控制单元、变速箱控制单元、方向助力转向控制单元、安全气囊控制单元等连接CAN数据总线的控制单元,刷新诊断仪自诊断列表其它控制单元依旧无法识别并进入,并且车辆依旧无法正常启动。
排除其它控制单元故障干扰!
4、诊断排查思路和维修过程(三)
2)数据总线故障检查:
根据电路图,首先使用万用表测量诊断CAN、驱动CAN和舒适CAN电压未发现异常,为了确保CAN是正常通讯,使用示波仪进行波形测量,发现驱动、舒适和诊断CAN均正常。
排除数据总线故障! 排除数据总线故障!
4、诊断排查思路和维修过程:(四)
诊断思路说明:按照刚开始的分析排除可能性,故障依旧无法解决,再次查看电路图,发现由于本车年款比较老,所以它的发动机和变速箱还是通过老式的K线诊断的。找同车型同配置车辆断开网关进行故障模拟,发现与该车故障现象和故障代码完全一致。确定为网关J533不工作导致,再次分析可能的原因:
1)J533电源线路故障
2)J533自身故障
4、诊断排查思路和维修过程:(五)
1)J533供电和接地线路故障检查:
根据电路图可知
从保险丝SB12到T20C/1为30常火线供电
从保险丝SC6到T20C/14为15a点火开关供电
打开点火开关,拔下网关插头使用万用表分别测量T20C/1和T20C/14电压均在12.2V左右,未发现异常。
检查T20C/11和T20C/12与车身左侧A柱下方接地点670之间的接地线正常。
初步排除网关的供电和接地线正常!
4、诊断排查思路和维修过程:(六)
2)J533自身故障检查:
拆卸J533检查相关插针无异常
把该车的网关J533安装到同车型同配置车辆上,试车使用正常
同车型同配置车辆上的网关J533安装到该车辆上故障依旧,排除网关J533自身故障!
5、故障原因确定:
故障原因/故障点:通过以上测量检查,均未发现异常,莫非哪一步检查出现问题了,回过头分析,J533自身、数据总线和其它控制单元肯定没问题,有问题的也可能是供电和接地虚接了。于是重新检查J533供电和接地线,这一次带负载进行测量,发现T20C/1供电电压比蓄电池电压偏低,只有10.9V,于是判断供电线虚接了。再次根据电路图,顺着电源线的走向检查电路发现发动机舱内线束磨损导致T20C/1虚接,修复线束后故障排除!
故障点照片:
6、思路总结与经验分享:
1、该车从一开始就犯了错误,在对网关线路检查的时候,未带负载对电路进行测量,结果出现了错误的结果,导致无法及时发现问题所在。
2、分析故障时,未能考虑车型的年限,两者之间有很大的不同,老车型是K线诊断线,新车型是CAN线诊断线,简单的问题复杂化了,影响了维修工作效率。
感谢大家浏览,喜欢不要忘记
三:k线和can线的区别
K线一般用于检测系统,属单线模式,与诊断仪器连接并相互传递数据。CAN线主要用于控制单元与控制单元之间传递数据、属双线模式,分高位线和地位线。四:汽车k线与can线的区别
K线是诊断总线(这个我记得稍微有点模糊,应该是没错),至于你说的CAN,I2C,lin什么的都是不同种类的总线,汽车上用的比较多的是CAN和lin,他们的区别在于速度不一样,CAN也分高速和低速CAN,lin是低速总线主要用于照明设备,所以不同的总线所需要的收发器,ECU也不相同,所以他们是不能通用的,但总线的特点是资源共享,所以一个汽车上如果用了不同的总线可以通过网关(相当于翻译)进行数据共享。
相关文章

k线 can线均呈多头排列,股价持续上涨,成交量放大,主力资金持续流入,kdj金叉向上,后市看好。具体操作思路和代码以及后期走势已经发布,我将会在朋友...
2022-09-23 2

k线的均线参数是什么意思?有什么作用?下面我们一起来看看。首先我们要知道,k线的均线参数是根据不同周期的均线来决定的,比如5日均线、10日均线、20日...
2022-09-23 2
征信负债怎么算?1、信用卡逾期还款会影响个人征信吗?答案是肯定的。如果持卡人长期不还款,银行会根据持卡人的信用记录,评估持卡人的还款能力,定是否继续催...
2022-09-23 2
基金对比股票基金,收益更高,风险更低。因此,我们可以选择定投的方式,每月固定投入一部分资金,长期坚持下去,不仅可以获得稳定的收益,还可可以让自己养成良...
2022-09-23 2
夫妻组合k线的形态特征。k线组合是股价运行的轨迹,它反映的是多空双方力量的对比情况,是研判行情的重要依据。下面笔者就来跟大家讲解下k线线组合形态,看懂...
2022-09-23 2
征信黑名单什么意思?信用卡逾期还不上时,应该怎么办?首先要与银行取得联系,表明自己目前的经济状况,困难情况以及困难的证明,主动表示有强烈的还还款意愿,...
2022-09-23 2

k线里的灰线,一般情况下,股价在低位形成w底或三重底等底部形态时,无论成交量是否放大,只要形态形成,就可以积极介入。特别是在股价跌至颈线线附近时,成交...
2022-09-23 2
新手如何选股看k线?1、股价经过一段时间横盘整理,均线系统趋向闭合,到达时间共振点,一根k线穿头破脚一举攻破5日;10日;20日;30日均线的阻力2、...
2022-09-23 1
发表评论